

Description
ESP32 아두이노 드론 만들고, 직접 코딩하여 드론 날리고 PID 제어해보자!
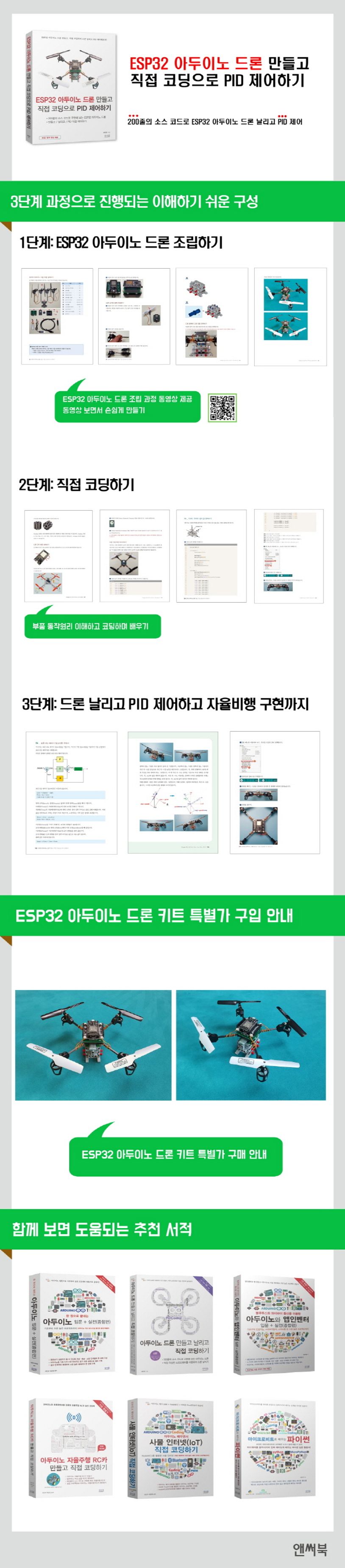
이 책은 내 손으로 직접 조립하고, 코딩하고, 날리고 PID 제어하기 3단계 과정으로 진행된다!
- 1단계 : ESP32 아두이노 드론을 직접 조립한다.
- 2단계 : 200줄의 소스 코드를 단계별로 접근한다.
- 3단계 : ESP32 아두이노 드론을 날리고, PID를 제어해본다.
이 책은 내 손으로 직접 조립하고, 코딩하고, 날리고 PID 제어하기 3단계 과정으로 진행된다!
- 1단계 : ESP32 아두이노 드론을 직접 조립한다.
- 2단계 : 200줄의 소스 코드를 단계별로 접근한다.
- 3단계 : ESP32 아두이노 드론을 날리고, PID를 제어해본다.
ESP32 아두이노 드론 만들고 직접 코딩으로 PID 제어하기 (200줄의 소스 코드로 구현해 보는 ESP32 아두이노 드론)
$28.58