

Description
"내 손으로 직접 만들고 제어하는 자율주행 로봇의 모든 것!
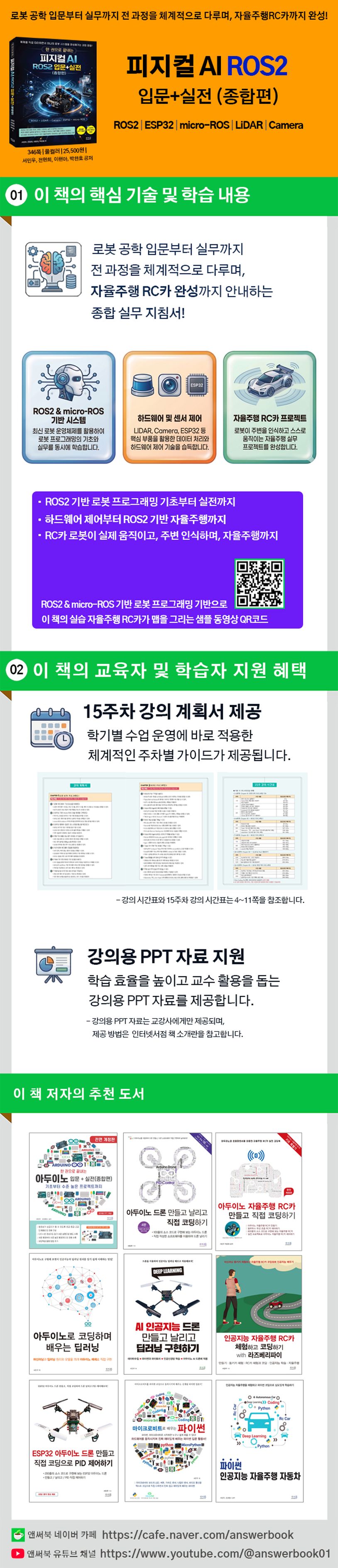
"ESP32, micro-ROS, 그리고 LiDAR와 Camera를 결합한 실전 피지컬 AI 입문서 로봇 공학에 관심이 있지만 어디서부터 시작해야 할지 막막하셨나요? 《한 권으로 끝내는 피지컬 AI ROS2 입문+실전(종합편)》은 복잡한 이론에 매몰되지 않고, 실제 RC카 형태의 로봇을 하드웨어부터 소프트웨어까지 직접 구축하며 배울 수 있는 종합 실전북입니다. 단순히 동작을 따라 하는 수준을 넘어, 임베디드 시스템인 ESP32와 로봇 운영체제인 ROS2를 연결하는 micro-ROS 환경을 구축합니다. 이를 통해 모터 제어의 기초부터 엔코더를 활용한 정밀 주행, 그리고 LiDAR 센서를 이용한 맵핑(SLAM)과 자율주행(Nav2)까지 단계별로 마스터할 수 있습니다. 특히 최근 각광받는 멀티 모달 AI API를 연동하여 로봇이 보는 장면을 자연어로 설명하는 심화 프로젝트까지 수록되어 있어, 전통적인 로봇 공학과 최신 AI 기술이 융합된 '피지컬 AI'의 진수를 체험할 수 있습니다.
이 책에서 배우는 핵심 내용은 다음과 같습니다.
- RC카 로봇 하드웨어 구성 및 micro-ROS 개발 환경 준비
- URDF를 이용한 로봇 모델링 및 좌표계(TF)의 이해
- LiDAR 센서 기반의 SLAM 맵 생성 및 Nav2 자율주행 실습
- 카메라 영상을 활용한 객체 인식 및 추적 주행 구현
- 멀티 모달 AI를 활용한 영상 장면 설명 기능 구현
이 책의 실습 관련 모든 부품은 키트로 편리하게 구입할 수 있습니다.
이 책의 실습 관련 책 소스 및 정오표는 아래 앤써북 도서 전용게시판을 통해서 다운로드 받을 수 있고 안내 받을 수 있습니다.
- https://cafe.naver.com/answerbook/9108
이 책의 PPT 강의자료는 교강사에게 지급하는 것을 원칙으로 하며, 신청 방법은 아래와 앤써북 독자지원센터를 참고하여 제공 받을 수 있습니다.
- https://cafe.naver.com/answerbook/507
키트는 아래 코코랩스 쇼핑몰에서 구입은 물론 부품 관련 문의도 할 수 있습니다.
- https://kocolabs.co.kr
이 책의 자세한 부품 목록 설명은 33~34쪽을 참고하고, 조립 방법은 34~39쪽을 참고합니다. 메인 보드의 주요 구성 요소와 각 기능은 40~41쪽을 참고합니다.
이 책에서 배우는 핵심 내용은 다음과 같습니다.
- RC카 로봇 하드웨어 구성 및 micro-ROS 개발 환경 준비
- URDF를 이용한 로봇 모델링 및 좌표계(TF)의 이해
- LiDAR 센서 기반의 SLAM 맵 생성 및 Nav2 자율주행 실습
- 카메라 영상을 활용한 객체 인식 및 추적 주행 구현
- 멀티 모달 AI를 활용한 영상 장면 설명 기능 구현
이 책의 실습 관련 모든 부품은 키트로 편리하게 구입할 수 있습니다.
이 책의 실습 관련 책 소스 및 정오표는 아래 앤써북 도서 전용게시판을 통해서 다운로드 받을 수 있고 안내 받을 수 있습니다.
- https://cafe.naver.com/answerbook/9108
이 책의 PPT 강의자료는 교강사에게 지급하는 것을 원칙으로 하며, 신청 방법은 아래와 앤써북 독자지원센터를 참고하여 제공 받을 수 있습니다.
- https://cafe.naver.com/answerbook/507
키트는 아래 코코랩스 쇼핑몰에서 구입은 물론 부품 관련 문의도 할 수 있습니다.
- https://kocolabs.co.kr
이 책의 자세한 부품 목록 설명은 33~34쪽을 참고하고, 조립 방법은 34~39쪽을 참고합니다. 메인 보드의 주요 구성 요소와 각 기능은 40~41쪽을 참고합니다.
한 권으로 끝내는 피지컬 AI ROS2 입문+실전(종합편) (ROS2, LIDAR, Camera, ESP32, micro-ROS)
$25.50